近日,清華大學精密儀器系尤政院士團隊提出了一種基于混合級聯平動超表面的雙模式激光雷達系統。該系統利用幾何相位與傳播相位超表面級聯調控,通過調制光的偏振狀態,在高精度波束掃描模式與高效閃光照明模式之間靈活切換,適應不同場景下的三維感知需求。結合自適應三維探測能方案,可動態調整探測模式與分辨率,成功彌合了傳統單一掃描式與閃光式激光雷達的技術局限,為高效、緊湊且具備更強環境適應性的三維感知提供了新途徑。
在主動三維成像技術中,激光雷達因其具備直接測距、高空間分辨率和強環境適應性的優勢,已廣泛應用于自動駕駛、機器人感知和高精度測繪等領域。根據光束覆蓋方式的不同,現有激光雷達系統主要分為掃描式和閃光式兩類。掃描式激光雷達主要借助機械部件逐點掃描目標,具有精度高、探測距離遠的特點,但探測速率受限;閃光式激光雷達則采用一次性照明的探測方式,具備高探測效率的優勢,但在成像精度和探測距離上存在不足。如何實現兼顧高精度、遠距離和高效率等指標需求的激光雷達,促使研究者不斷探索新型光束調控方法。近年來,隨著納米光子學的發展,超表面技術因具備高精度、多通道光束調控能力和輕薄易于集成的特性,為激光雷達系統的多功能化、小型化提供了全新解決方案。
為突破現有技術瓶頸,尤政院士團隊研發出一種雙模式光束調控器件,將可調諧混合級聯超表面與形狀記憶合金微致動器相結合,融合了點陣掃描與閃光成像的優勢,可根據探測需求在高分辨率點陣掃描模式與單次均勻照明模式之間靈活切換。相比現有方案,該技術能有效兼顧探測分辨率、視場范圍與探測效率等關鍵指標,能夠滿足復雜環境下的高精度三維探測與快速全局感知需求,為新一代激光雷達系統、自主導航以及先進三維成像技術的發展提供了新思路。
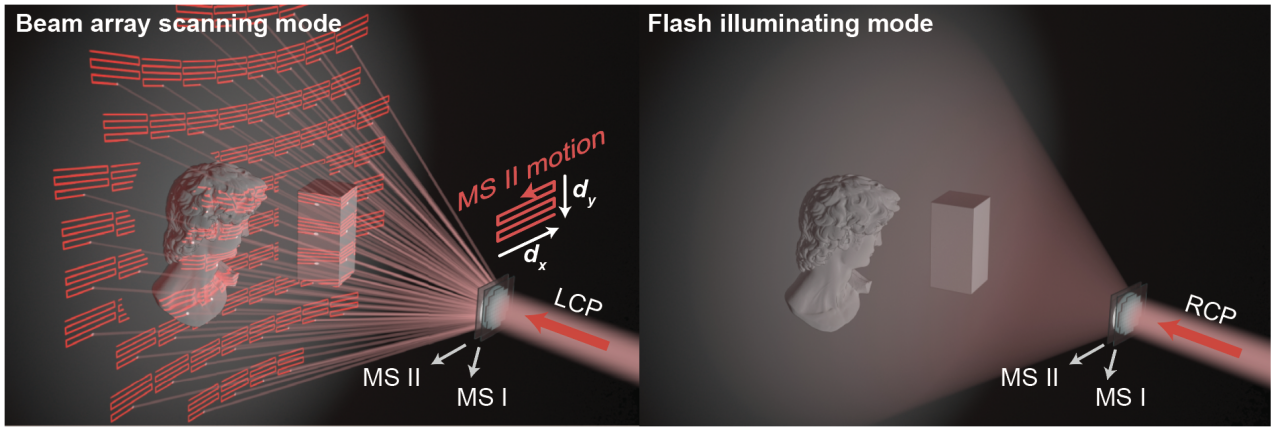
圖1.基于混合級聯平動超表面實現的雙模式三維探測原理圖
通過控制入射光的偏振態,即可實現兩種光束覆蓋模式間的靈活切換:左旋圓偏振光對應點陣掃描模式,級聯超表面間±100 μm微小相對面內平移可實現±35°二維視場的高準直點陣光束掃描,改變位移步長可動態調整分辨率,適用于高精度、遠距離的三維掃描任務;右旋圓偏振光對應閃光模式,通過一次性照亮整個視場,可實現瞬時三維成像。
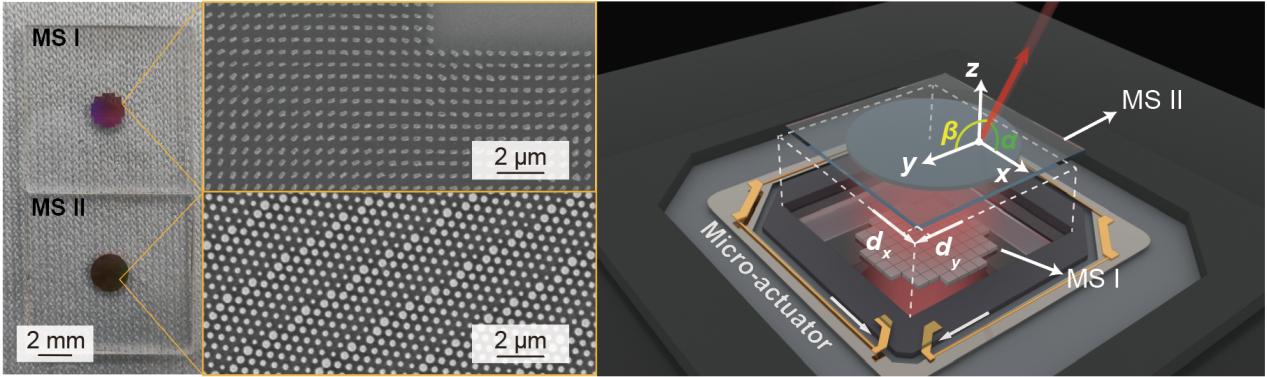
圖2.基于集成級聯超表面-致動器平臺的光束調控器件
混合級聯超表面作為器件的核心,第一層為偏振敏感的幾何相位超表面并采用陣列化設計,第二層為非偏振敏感的傳輸相位超表面。級聯超表面針對1064 nm波長設計,分別采用
標準微納加工工藝制備,包括等離子增強化學氣相沉積(PECVD)、電子束曝光(EBL)與感應耦合等離子體刻蝕(ICP)等步驟加工。光束調控器件集成形狀記憶合金微致動器實現兩層超表面之間的高精度面內位移驅動,具備微型化、響應快和易集成等優勢。
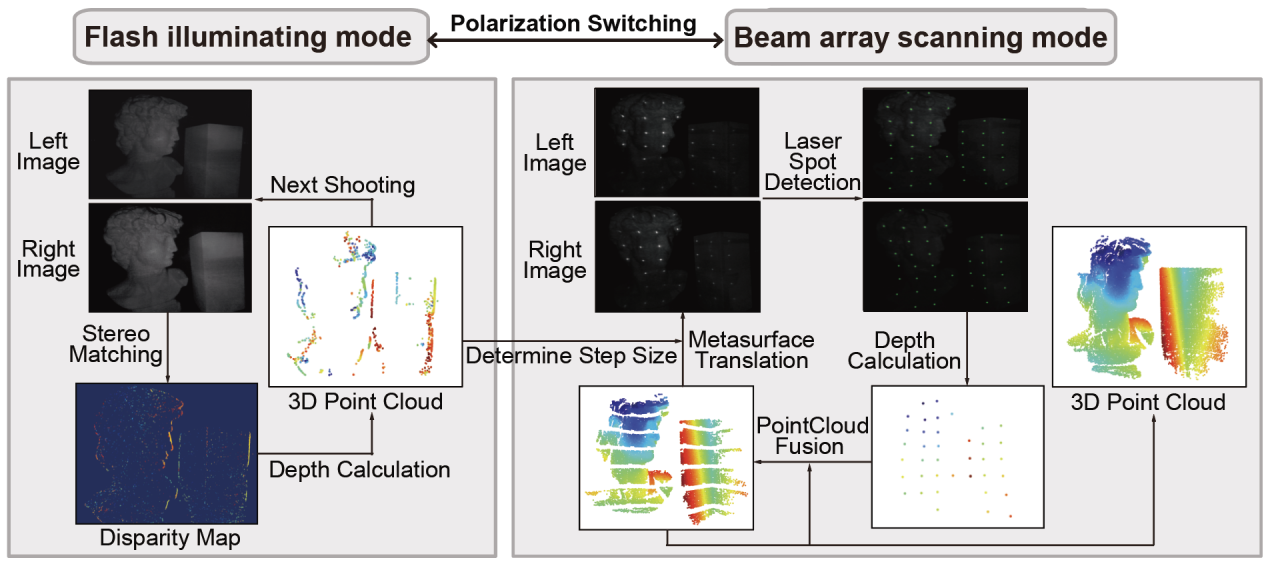
圖3.基于雙模式激光雷達系統的三維探測流程示意圖
此外,研究團隊基于光束調控器件構建了一套雙模式激光雷達系統與自適應三維重建方案。系統首先工作在閃光模式下,快速完成整場景的快照式三維探測,獲取目標邊界形貌與復雜度信息。該初步數據為后續掃描模式中的步進策略提供依據,使系統能夠根據實際目標特征智能選擇掃描分辨率。在波束掃描階段,系統可靈活執行粗略或精細的定向掃描任務,兼顧整體效率與局部細節。該系統通過偏振態驅動實現兩種模式間的靈活切換,在保證全局快速探測的同時精確捕捉目標關鍵特征,突破了傳統單一激光雷達在效率與精度之間互相矛盾的性能瓶頸。
基于混合級聯超表面多通道、高自由度光束整形能力,雙模式激光雷達系統在融合掃描式激光雷達高精度與flash激光雷達高效率優勢時,顯著提升了在復雜環境與多樣探測任務下的適應性與靈活性。此外,借助超表面器件的超薄、超輕與可集成優勢,研究團隊研發出一套輕量化、精度可調的光束調控平臺,可與飛行時間法、雙目視覺等多種三維成像機制兼容,具備良好的系統集成與功能擴展能力。研究團隊表示,該工作不僅構建了可適配多任務需求的高性能三維感知平臺,也為推動激光雷達系統的小型化、智能化與多模式探測發展提供了新思路。
相關研究成果以“通過機械可調混合級聯超表面實現的雙模激光雷達系統”(A dual-mode LiDAR system enabled by mechanically tunable hybrid cascaded metasurfaces)為題,于8月25日發表于《光:科學和應用》(Light: Science & Applications)。
該研究由清華大學精密儀器系、精密測試技術與儀器國家重點實驗室、北京市集成電路高精尖創新中心、北京信息科技大學智能微系統實驗室,以及華中科技大學智能制造裝備與技術國家重點實驗室共同完成。清華大學精密儀器系2019級博士生張凌云和2022級博士生張馳為論文共同第一作者。清華大學精密儀器系教授邢飛、副教授趙曉光與北京信息科技大學教授景曉麗為論文共同通訊作者。研究得到國家自然科學基金、國家重點研發計劃等的資助。